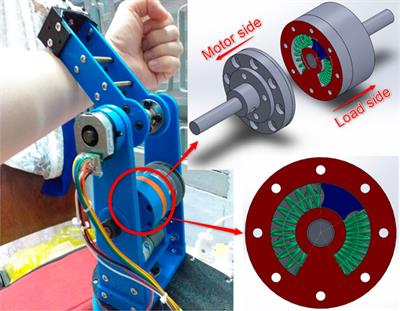
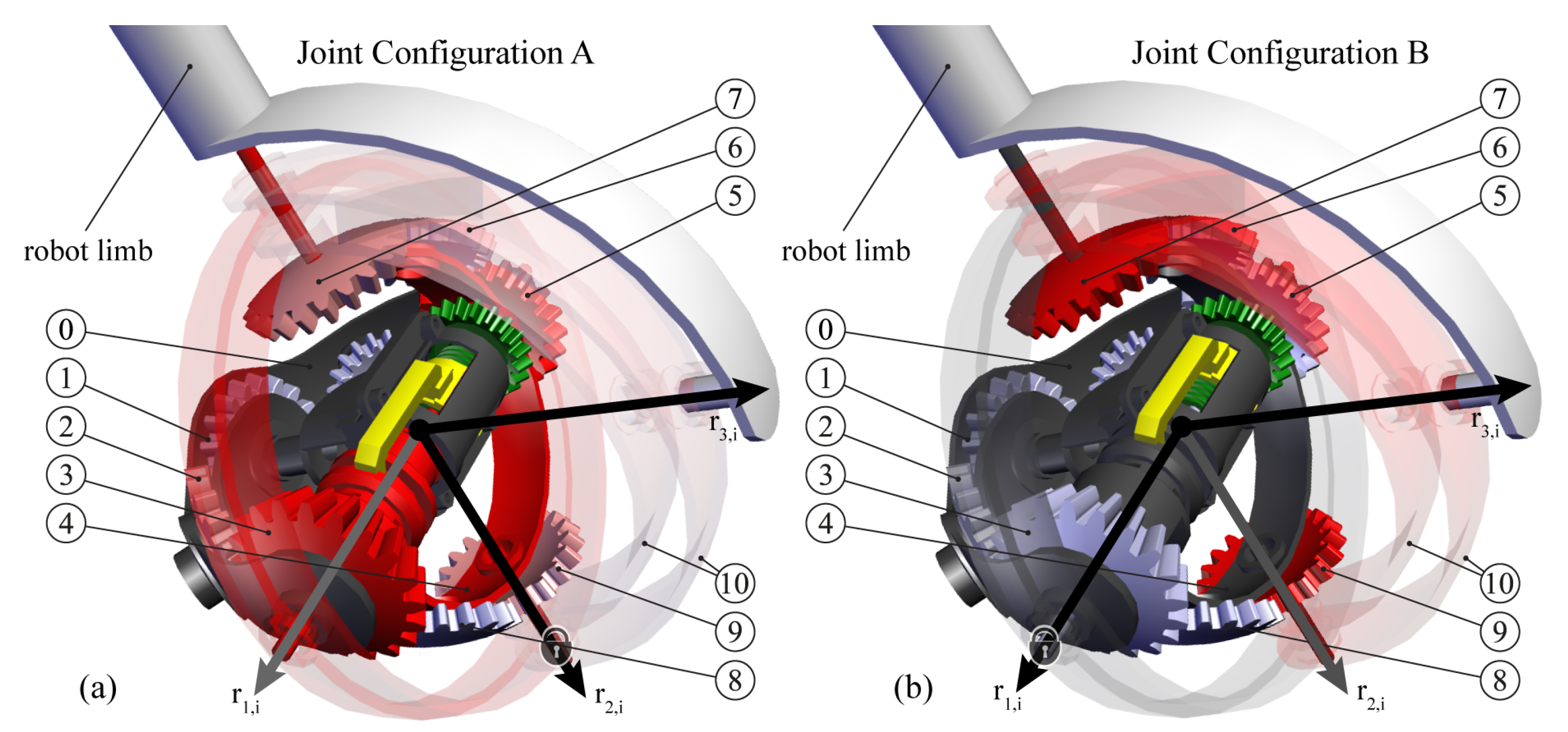
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 15 abril 2025

Design and Analysis of Articulated Inspection Arm of Robot
Robotics, Free Full-Text
Robotics, Free Full-Text
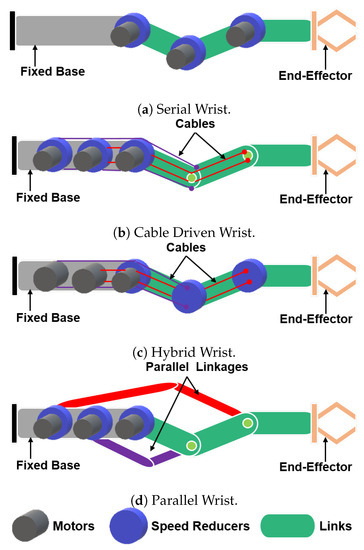
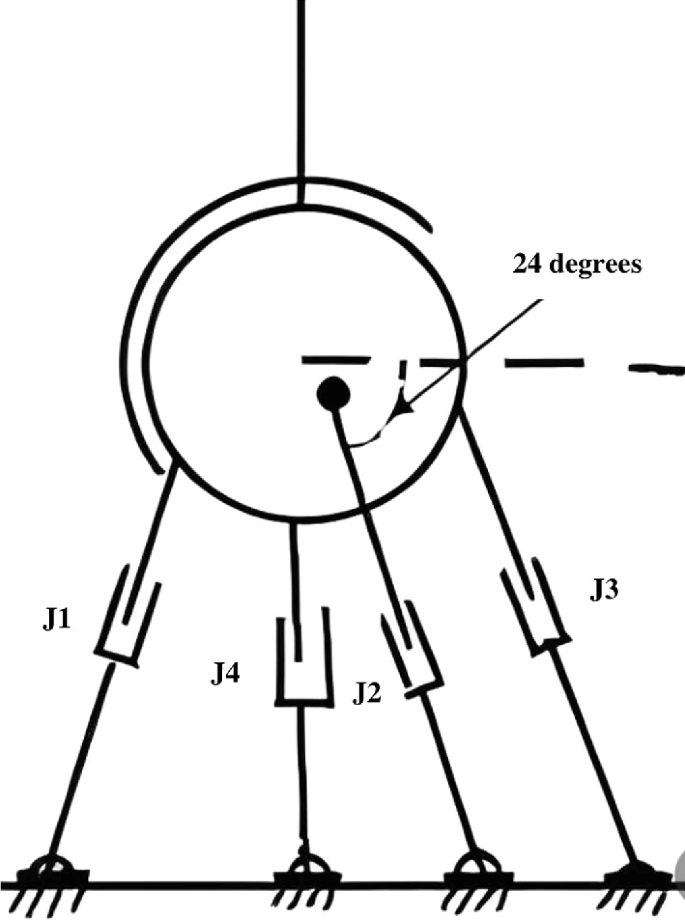
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)
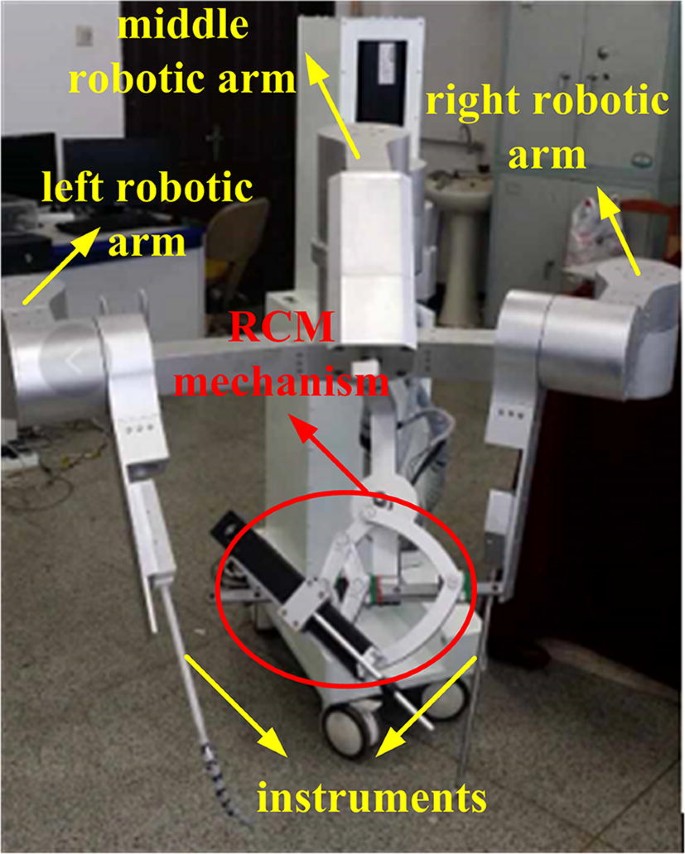
New remote centre of motion mechanism for robot-assisted minimally invasive surgery, BioMedical Engineering OnLine
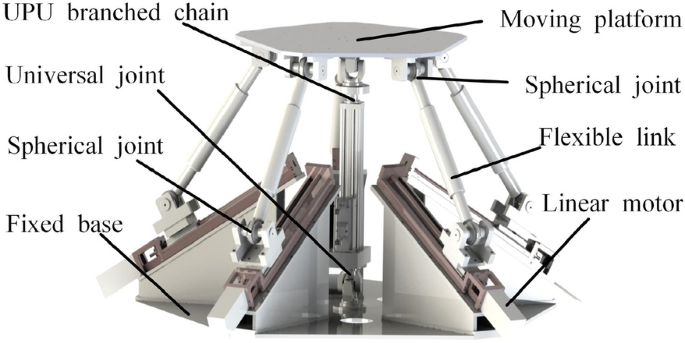
Dynamic Accuracy Analysis of a 5PSS/UPU Parallel Mechanism Based on Rigid-Flexible Coupled Modeling, Chinese Journal of Mechanical Engineering

Design and Analysis of Articulated Inspection Arm of Robot
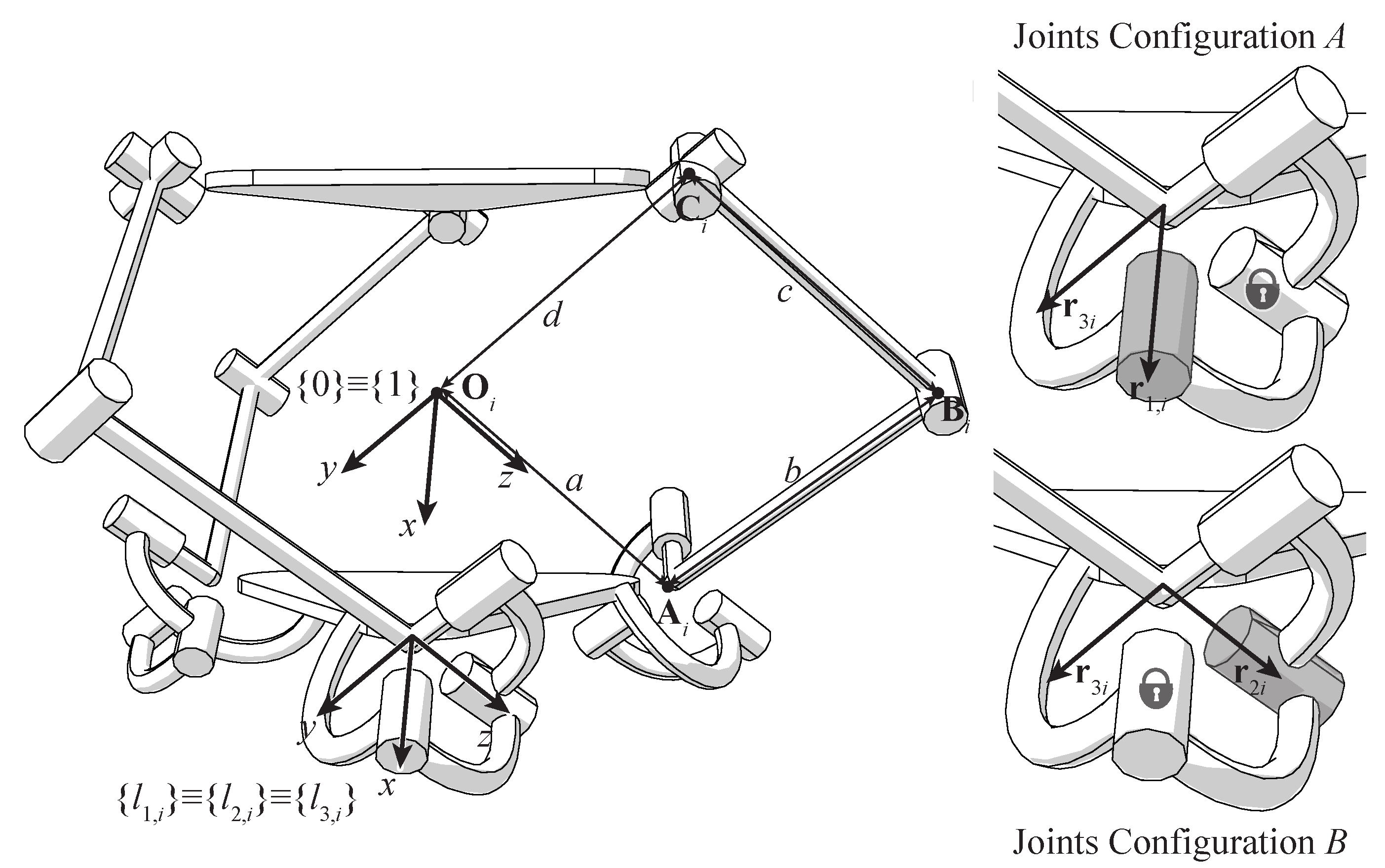
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Robotics, Free Full-Text
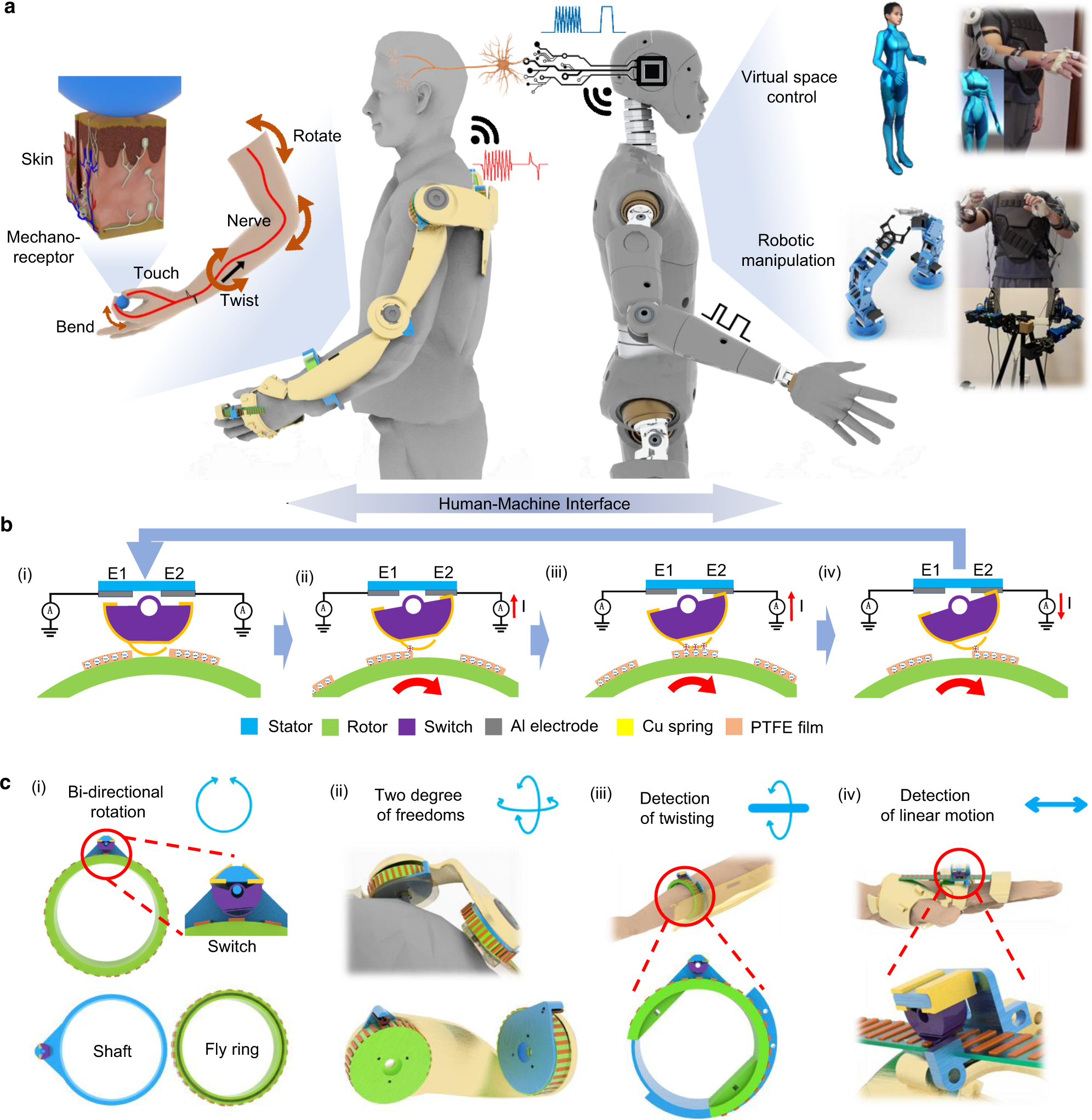
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system

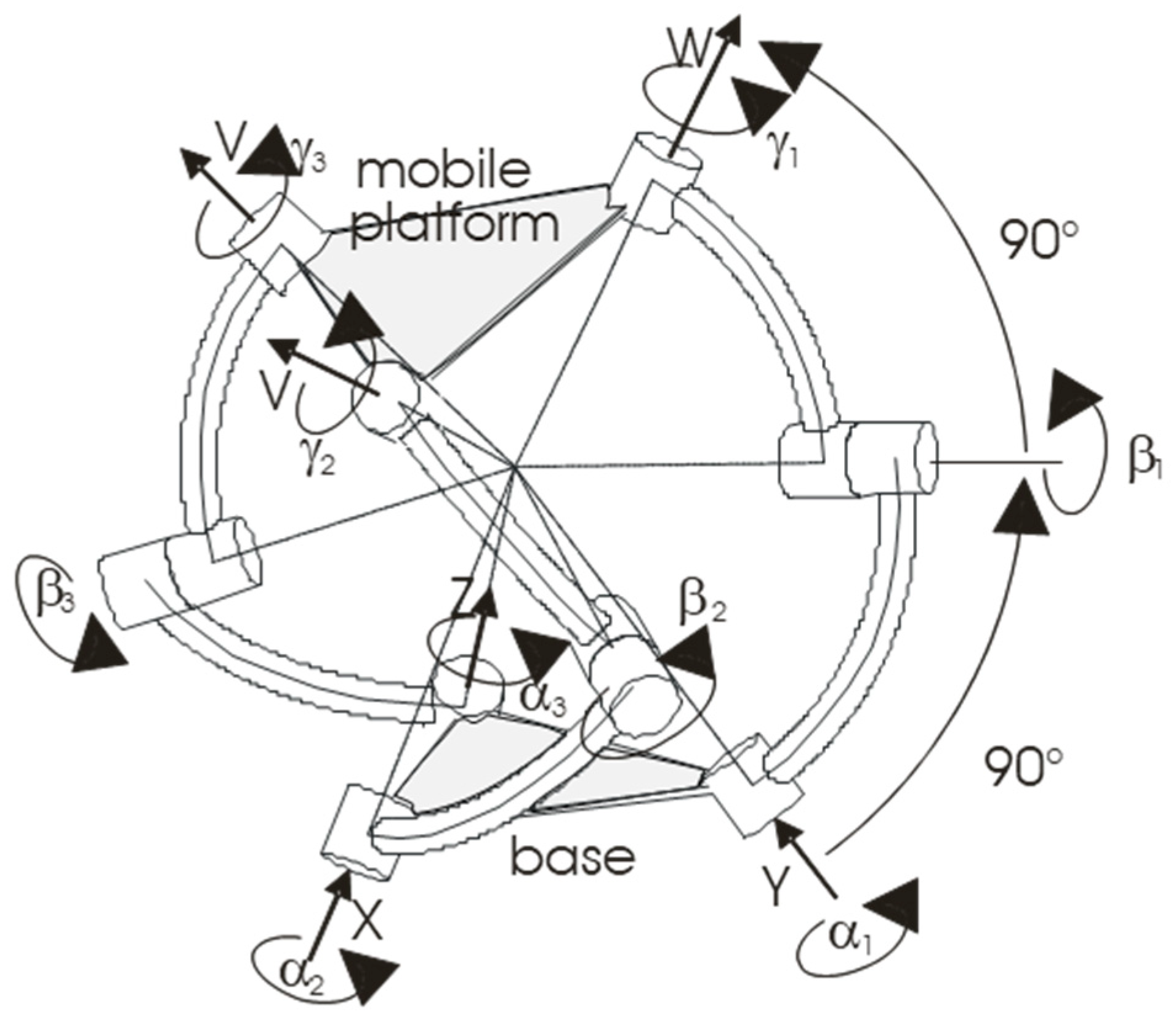
Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect
Frontiers Modelling and Control of a 2-DOF Robot Arm with Elastic Joints for Safe Human-Robot Interaction

Design and Prototyping of a Spherical Parallel Machine Based on 3-CPU Kinematics
Robotics, Free Full-Text
Recomendado para você
-
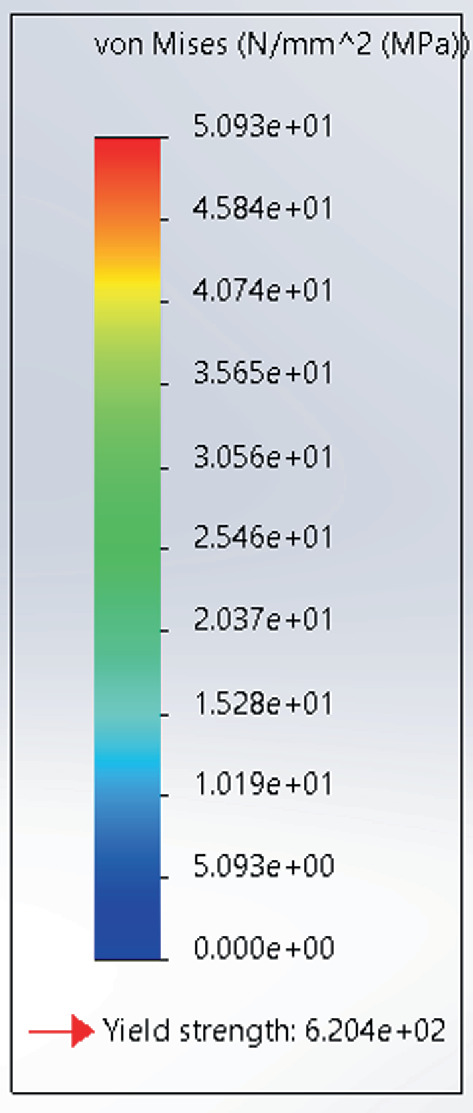
 Compressive Strength Values (in N/mm 2 )15 abril 2025
Compressive Strength Values (in N/mm 2 )15 abril 2025 -
 Oiles SPB-405030 Box of 4 Straight Bushing - 40 mm ID - IMS Supply15 abril 2025
Oiles SPB-405030 Box of 4 Straight Bushing - 40 mm ID - IMS Supply15 abril 2025 -
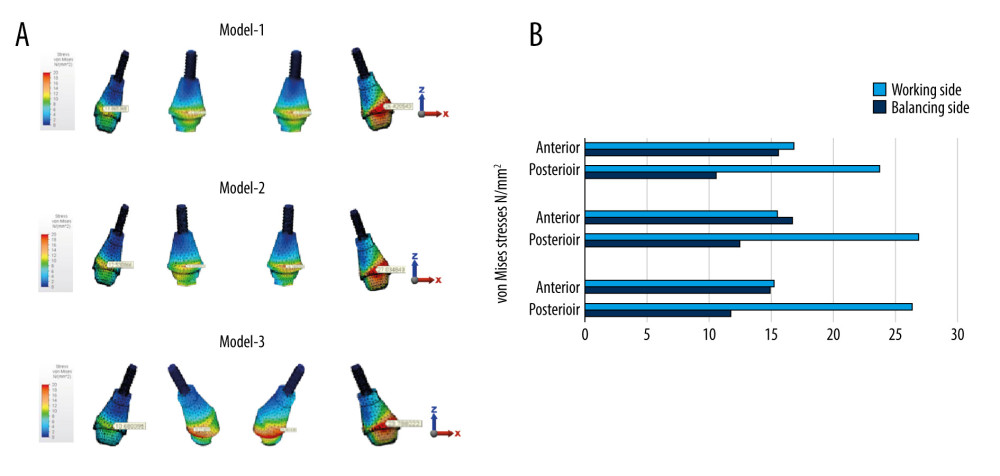 Medical Science Monitor Biomechanical Behavior of All-on-4 and M-4 Configurations in an Atrophic Maxilla: A 3D Finite Element Method - Article abstract #92990815 abril 2025
Medical Science Monitor Biomechanical Behavior of All-on-4 and M-4 Configurations in an Atrophic Maxilla: A 3D Finite Element Method - Article abstract #92990815 abril 2025 -
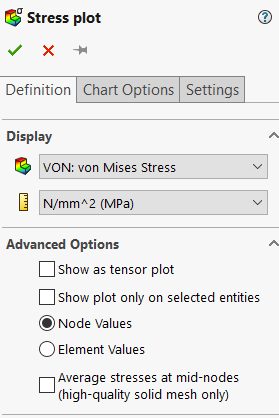 Differences in Node and Element Values for SolidWorks Simulation - IME Wiki15 abril 2025
Differences in Node and Element Values for SolidWorks Simulation - IME Wiki15 abril 2025 -
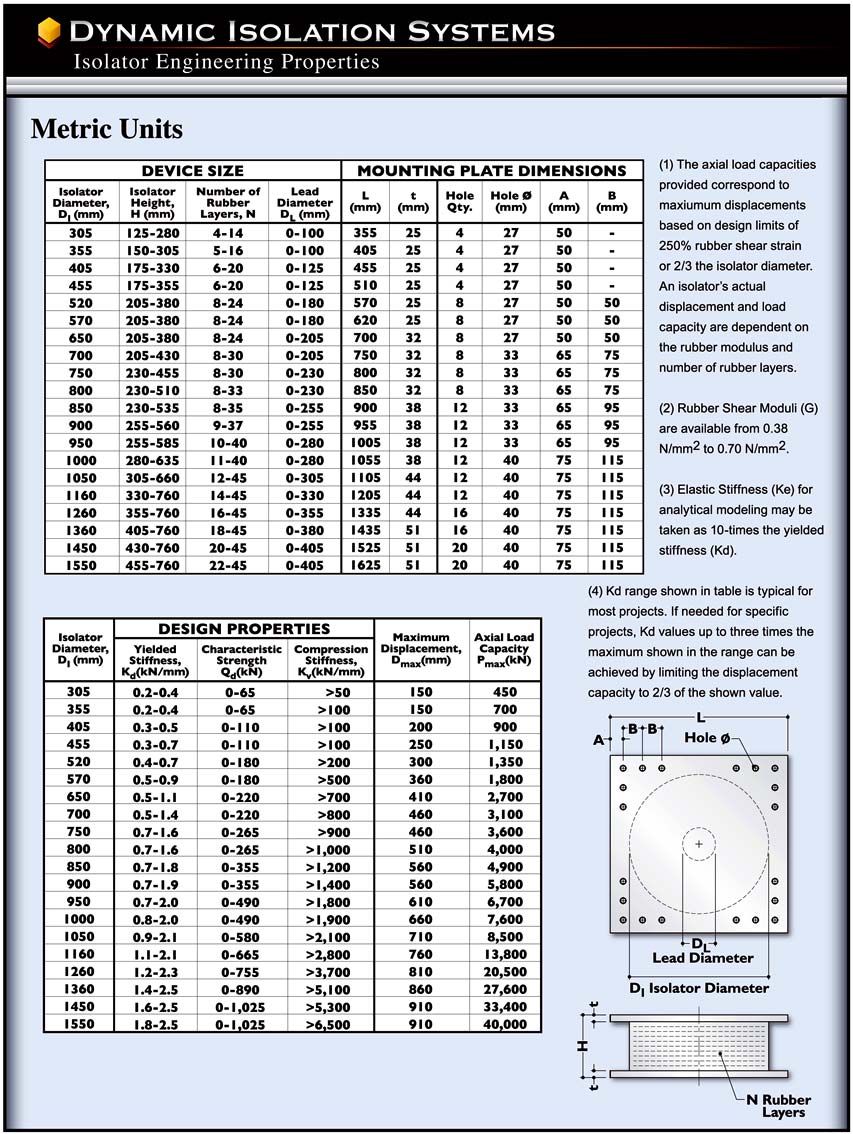 Dynamic Isolation Systems - Technical Information15 abril 2025
Dynamic Isolation Systems - Technical Information15 abril 2025 -
 Fitness-for-Service - Acuren15 abril 2025
Fitness-for-Service - Acuren15 abril 2025 -
Shandong Laboratory Metal Co.,Ltd - Mechanical properties of #Steel 25CrMo4(1.7218) 🏗Tensile Strength:min 740 N/mm2 🏗Yield Strength:min. 590 N/mm2 🏗Elongation:min.15 %(l) 🏗Kv-Imapct value:min.80J (l)15 abril 2025
-
Solved] The contact between femoral and tibia components in knee joint15 abril 2025
-
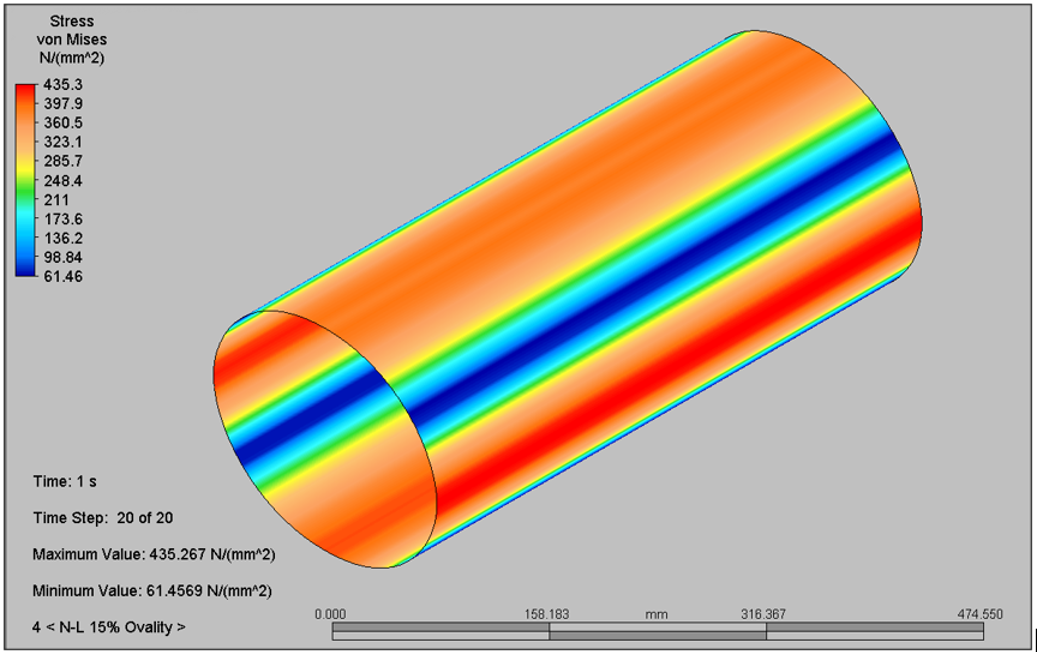
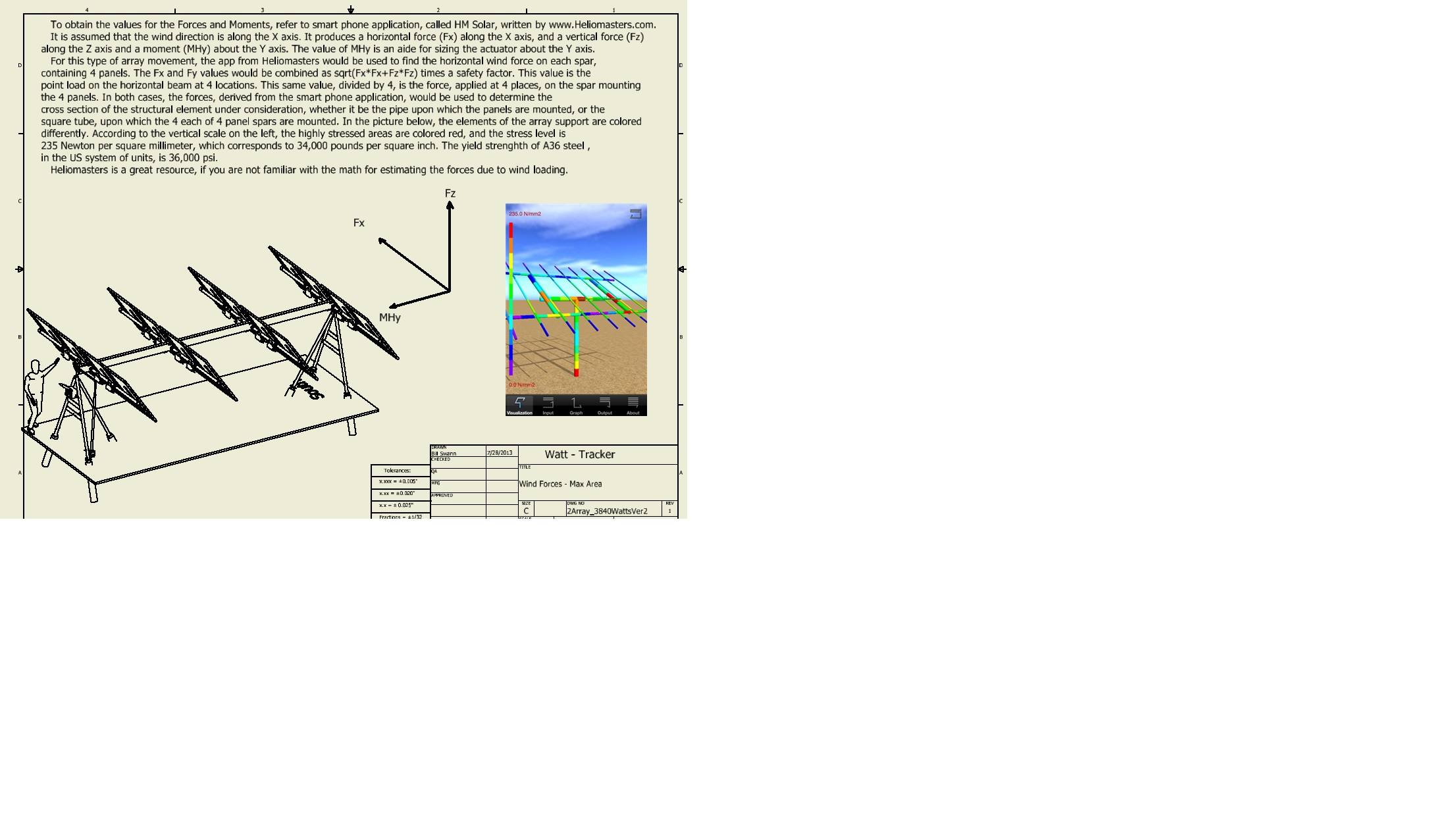 Wind Forces15 abril 2025
Wind Forces15 abril 2025 -
![Solved] Principal stresses at a point are 80 N/mm2 and 40 N/mm2, bot](https://storage.googleapis.com/tb-img/production/20/05/F3_A.M_Madhu_05.05.20_D%201.png) Solved] Principal stresses at a point are 80 N/mm2 and 40 N/mm2, bot15 abril 2025
Solved] Principal stresses at a point are 80 N/mm2 and 40 N/mm2, bot15 abril 2025

você pode gostar
-
 Se não tem play a gente joga truco NXZero - Pensador15 abril 2025
Se não tem play a gente joga truco NXZero - Pensador15 abril 2025 -
 Subway Surfers Highest Score In The World (1,000,000 Coins In One Run)15 abril 2025
Subway Surfers Highest Score In The World (1,000,000 Coins In One Run)15 abril 2025 -
 Pokemon Fusion ARTS Toxel 36/100 NM/M Japanese15 abril 2025
Pokemon Fusion ARTS Toxel 36/100 NM/M Japanese15 abril 2025 -
 Frozen 2: dublador do Rei Agnarr acha que filme pode não ganhar15 abril 2025
Frozen 2: dublador do Rei Agnarr acha que filme pode não ganhar15 abril 2025 -
 Dragon Ball Z Budokai Tenkaichi 3: Goku vs. Frieza - Goku Goes15 abril 2025
Dragon Ball Z Budokai Tenkaichi 3: Goku vs. Frieza - Goku Goes15 abril 2025 -
Waku waku - #anya #spyxfamily #anime #spiderman #memes #9gag15 abril 2025
-
 Rockstar's GTA: The Trilogy to launch in November, check system requirements15 abril 2025
Rockstar's GTA: The Trilogy to launch in November, check system requirements15 abril 2025 -
 SoaR ZEPHY on X: MW2 vs MW2 Remastered - Intervention Comparison / X15 abril 2025
SoaR ZEPHY on X: MW2 vs MW2 Remastered - Intervention Comparison / X15 abril 2025 -
 Five Nights At Freddy Wall Art for Sale15 abril 2025
Five Nights At Freddy Wall Art for Sale15 abril 2025 -
 Subway Surfers World Tour: Cambridge, Subway Surfers Wiki15 abril 2025
Subway Surfers World Tour: Cambridge, Subway Surfers Wiki15 abril 2025
